Article Overview
This work introduces a generalized discrete coupled kinematic model for a tendon-driven aerial continuum manipulation system (TD-ACMS), grounded in the strain-based formulation of Cosserat rod theory. Unlike traditional models limited to planar bending, this approach accounts for all six deformation modes of the continuum segments, enabling full-body coordination with the aerial platform.
A key contribution is the derivation of a conventional-format coupled Jacobian, which simplifies the development of kinematics-based controllers without requiring the solution of complex differential–algebraic equations. The model’s effectiveness is demonstrated through an image-based visual servoing (IBVS) task featuring a customized tendon routing strategy.
Comparative results show significant improvements in trajectory tracking performance, especially for complex and time-sensitive maneuvers. Real-world experiments on a physical aerial continuum manipulator validate the proposed model and control strategy.
Key Features
-
Full-Body Deformation Modeling: Captures all six deformation modes of the continuum robot segments using strain-based Cosserat rod theory, surpassing models that only consider planar bending.
-
Simplified Control via Coupled Jacobian: Introduces a conventional-form Jacobian that facilitates kinematics-based control design without solving stiff differential–algebraic equations.
-
Validated High-Performance IBVS: Demonstrates superior trajectory tracking in image-based visual servoing (IBVS) tasks, confirmed through both simulations and real-world experiments with a physical prototype.
Figures
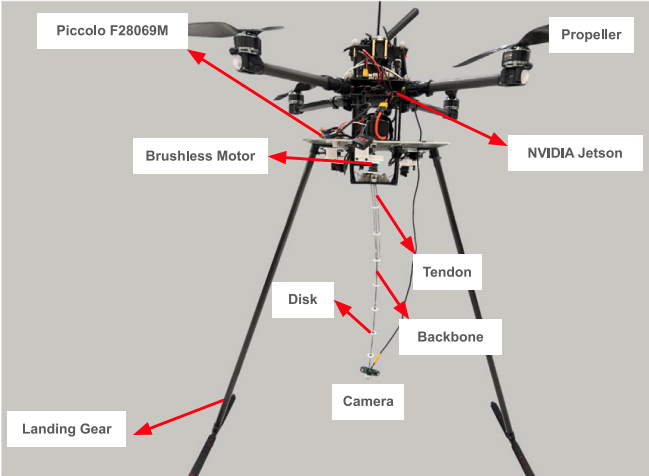
Components of the tendon-driven aerial continuum manipulation system.
Read More
You can read the full paper here.
Citation
@article{amiri2025high,
title={High-performance coupled kinematics of aerial continuum manipulation systems for control applications},
author={Amiri, Niloufar and Janabi-Sharifi, Farrokh},
journal={Robotics and Autonomous Systems},
pages={105021},
year={2025},
publisher={Elsevier}
}